Collaborative Development
How all of us together can develop a humanoid robot
Collaborative Development
How all of us together can develop a humanoid robot
Let’s Shape The Future Together!
We develop pib in Onshape, the CAD platform of our choice.
When designing and naming new parts of pib, please keep our Design Guide in mind.



How do I get to the pib-CAD?
pib is public, that means every registered user can see and copy it. On your Onshape homepage you can search for public documents on the left, select “Public” and enter “pib” in the search bar at the top. Our document will appear in the list on the right.
Now it’s easy: Double click on pib and you’re there! Take your time to look at our document; the document is initially only open for reading and nothing can happen unintentionally.

Design Guide for Developing pib
Humanoid
The pib.rocks team believes in the future of humanoid robots. Our environment and our tools are chosen for us as people. Instead of having individual specialized robots for each task, pib naturally becomes a part of our familiar world.
3D printable
Good ideas are feasible. All parts of pib must be able to be created as easily and realiably as possible with standard printers.
Open
pib is and will remain open. That holds true for the hardware as well as software and also for the development process we are using.
Maintainable – aka “no glue!”
pib’s parts must be easily exchangable and updatable. Even if it is tempting to quickly glue some parts together – we are conscioulsy doing without that! We are putting a lot of effort into the easy maintainability of pib.
Great user experience
pib is intuitively buildable because the parts explain themselves and follow a central theme which is this design guide.
Great community, documentation and support
We – the pib community – have a shared vision that we want to work on together. We are excited about each new member! For an appreciative cooperation we value but also demand the principles of our code of conduct.
Accessible
Gaining access to pib should be as simple as possible. Even though there may be plenty of great building parts that could optimize pib, we are trying to focus on non-printable parts that are as widely available and as affordable as possible.
The names of the building parts consist of English identifiers connected by underscores and follow the convention:
__
The body part begins with a capital letter, the other elements are either in lowercase letters or, if compound, in camelCase notation.
The body part corresponds to the part studio in which the part is being developed (Arm, Body, Hand, Leg, …) and enables us to quickly find the correct position in the CAD document. Especially since we reuse some parts in different places this is helpful for the navigation. This indication is mandatory.
The function describes what the building part is being used for with pib. Ideally, an anatomic indication is being used which of course is not always possible. A few examples are:
- for the attachement of the joint which enables the lifting of the arm (“abduction”), the description is “abductionMount”
- for the carrying shell it’s “shell”
- for the mount of the motors “motorMount”
Connections are made with M3 screws with Allen screw. The corresponding hexagon nuts have a height of 2.5 mm.
Simple drill holes for the M3 screws have a diameter of 3.2 mm. For countersunk bolts the following modulations are used:
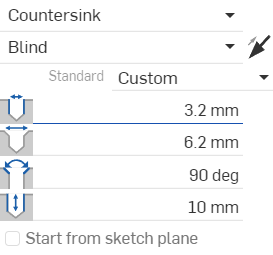
For the nuts, hexagonal recesses are being set. In Onshape, you will use a hexagon with an inner diameter of 2.85 mm.
What opportunities are there to work on pib?
Working on your own pib
If you want to try and change something, you can copy our pib document. In the open pib document there is a blue button “Make a copy to edit” at the top, click on it and you have an editable own version of the document in your workspace!
Your copy is detached from our pib document, so nothing can happen here either. You can try and make changes as you like. Happy designing!
Contribute to our official pib document
We hope that pib will be further developed by a creative and enthusiastic community. Co-development is done in our official pib document.
In order for you as a developer to be able to make changes to the document, we have to add you to our project. With great power comes great responsibility 😃 Before we add you, we’d like to get to know you a little. Please write a short email to team@pib.rocks and we will definitely get back to you.
Why an open source robot?
For us, pib is more than a robot, pib is a community project, a platform with which we can learn and benefit from each other. The more members we have, the more different experiences are incorporated, the better we can develop our robot. Everyone is invited to contribute ideas, work on proposals, and bring our robot project forward step by step. That’s why we thought of something special for the development of pib: We work collaboratively using a CAD program to which Maker is granted free access. This should make it as easy as possible to join our robot community, so that everyone can eventually have their own humanoid robot at home.